
상하방향회전 비행
(Flapping Flight)
도전
(CHALLENGE)
David Catchpoole 글, 이종헌 역
출처: creation magazine Vol. 42(2020), No. 2 pp.20-21

국내에서 UAV(Unmanned Aerial Vehicles/무인항공기, 일상 언어로 ‘드론’)의 인기가 급상승 한 것은 그것에 대한 성능과 신뢰성 및 구입 가능성의 측면에서 기술적 진보가 이루어졌기 때문이다. 가장 일반적인 형태는 쿼드콥터(4개의 회전날개를 가진 헬리콥터)로서, 웨딩 사진작가, 비디오 제작자 및 레크레이션 애호가 등이 원격 조종을 하는 것이다.
그러나 아직 개선의 여지가 있다. 많은 사람들은 날개 달린 생물의 놀라운 기동성과 에너지 효율에서 영감을 얻어, 상하방향회전 날개를 갖는 로봇을 만드는 쪽으로 열심히 과학적 진보를 모니터링하고 있다. 곤충, 박쥐 및 새들은 동굴, 지하 주차장, 울창한 삼림 덮개에서 쉽게 날 수 있다. 그리고 상하방향회전 날개는 일반적으로 드론 회전날개보다 더 가단성(malleable)이 높고, 낮은 선단 속도로 이동하기 때문에 UAV가 사람이나 재산에 의도치 않게 접촉함으로써 생기는 피해가 적을 것이다.
또한, 소형 로봇이 직면하게 되는 대부분의 비행 조건에서, 상하방향회전 날개의 이동은 회전날개 이동보다 (드론 회전날개의 회전수에 있어서) 특히 호버링(공중에 정지해 있는 상태) 할 때 그것을 상승시키는 효율이 두 배 이상이라는 것이 밝혀졌다.(1)
이러한 이유 및 다른 이유로, 생물에서 영감을 받은 상하방향회전 날개 비행은 적어도 지난 20 년 동안 생체모방공학의 관심 분야로 집중되어왔다. 항공학에 대한 우리의 지식과 이해에 주목할 만한 발전이 있어왔다. 그러나 실질적인 상하방향회전 비행은 여전히 거대한 도전으로 남아 있다.
실제로, 엔지니어들은 특히 ‘나노’(곤충 크기) 범위에서 많은 도전에 직면한다.
드론은 튼튼하면서도 가벼우면서 곤충의 날개 근육 시스템의 견고성과 정확성에 맞는 재료로 제작되어야 한다.
전원의 무게가 가벼워야만 한다. 그러나 현재까지 작동장치/actuators(에너지를 운동으로 변환하는 장치)와 배터리가 생체 조직의 전력 및 에너지 용량과 조화되는 수준에 훨씬 미치지 못한다.
그리고 결정적으로는, Nature지 저자의 말마따나, “동물들이 정지 비행을 유지하고 기동하기 위해 일상적으로 사용하는 감지 및 제어 알고리즘은 엄청나게 복잡하다.”(2) 사실상 엄청나게 복잡하기 때문에 우리가 가진 최고의 슈퍼컴퓨터조차도 이들 알고리즘을 모방하기 위해 고군분투한다. 그리고 그것은 백만개 정도의 뉴런밖에 가지고 있지 않은 전형적인 곤충의 뇌와 비교할 때, 수백만 개의 구성 요소를 가진 슈퍼컴퓨터의 처리 시스템에도 불구하고 그러하다.
요컨대, 기존의 기술은 현재 지속적이고 동력을 가진 상하방향회전 날개 로봇 비행을 달성하기 위한 탐구에 있어서 자연보다 크게 뒤떨어져 있다. 최근의 ‘획기적인’ 연구에 대한 특별한 예는 이것을 아이러니 한 방식으로 강조한다.
“Sustained”(?) flight of the RoboBee(로보비의 “지속적인”(?) 비행)
한 연구팀은 “곤충 크기의 상하방향회전 날개가 달린 초소형 비행체의 지속적인 무선 비행”을 시연했다고 발표했다.
그 이전에, 곤충 크기 로봇(즉, 무게가 0.05g(0.0176oz.) 이하이고, 최대 날개 폭이 5cm(2 인치)인)을 설계하려는 시도는 전력 공급원으로부터 떨어져 유선으로 연결되어 있어야했다. (기존의 배터리 기술은 초소형 비행 로봇에 비해 너무 무겁다.) 그러나 이 연구자들은 작은 네 날개 로봇에 광전기성 배열(태양광 패널)를 설치함으로써 이 문제를 창의적으로 해결했다. 자연광보다 3배 이상 강력한 인공조명이 있는 한, 이 장치는 RoboBee X-Wing이라 불리는 이 장비가 소비하는 110-120 밀리와트의 전력을 공급할 수 있었다. 연구자들은 그들의 시스템이 “유사한 크기의 벌과 같은 곤충의 추력 효율과 상응한다”고 말했다. 그러나 그들의 가장 대담한 주장은 “(충동적인 점프 또는 이륙과는 대조적으로) 이 곤충 규모의 비행체는 지금까지 지속적인 무선 비행을 달성하는 것 중 가장 가볍다”는 것이다.(3)
Nature지의 리뷰어는 이 연구의 중요한 획기적인 측면에 대한 공로를 인정하면서도, 일부 사람들은 로보비의 비행이 “지속” 되었다는 주장에 트집을 잡을 수 있다고 경고했다. 그 이유는 “그 로봇이 1초도 채 안되는 동안 날다가 시야를 벗어났는데, 아마도 불시착을 한 것으로 보이기 때문이다.”(2)
따라서, 아직도 갈 길이 멀다! 그리고 상하방향회전 비행 도전에 깔려있는 또 다른 근본적인 ‘세계관’ 문제가 있다. 대부분의 연구 노력은 진화론적인 맥락에서 이루어졌다. 예를 들어, 진화론자들은 “생물학자들이 상하방향회전 날개 로봇을 사용하여 비행의 진화와 자연 선택의 기계론적 기초에 관한 근본적인 질문을 설명할 수 있기를” 기대하고 있다.(2) 그러나 수백만 년에 걸친 단순한 단계적 과정으로 묘사되는 ‘진화’가 정말로 상하방향회전 비행의 기원을 설명해 줄까? 또는 나는 생물이 정지 비행을 유지하고 또 기동하기 위해 “일상적으로” 사용하는 “엄청나게 복잡한” 알고리즘까지도?(2) IT 전문가는 부분적으로만 완전한 알고리즘은 누구에게도 쓸모가 없다는 것을 쉽게 인정할 것이다. 그렇다면 자연선택이 모든 단계마다 전혀 불완전한 비행 알고리즘을 선호한다고 누가 믿을 수 있단 말인가?
분명히, 문외한이든 전문가이든 누구나 로보비 또는 다른 비행체를 만나는 사람은 목적을 가지고 신중한 설계 특징이 내재된 것을 보게 될 것이므로, 그것이 설계된 것이 분명하다고 결론을 내릴 것이다. 그리고 그것을 설계하는데 책임이 있는 사람이 누구든 그 사람은 조금이라도 지능이 있어야 한다. 따라서 벌, 새들, 박쥐 등의 로봇 모방을 시도하는 면에서 볼 때의 논리적 결론이 ‘지적 설계자’라면, 특별히 대부분의 복사본이 아주 많은 면에서 원본에 못 미치므로 살아있는 원본에 대해서는 얼마나 더 그러할까? 따라서 생명에 대해 지적 설계자가 있다고 보는 것은 현저히 이성적이고 합리적이다.
성경은 우리에게 지적 설계자가 누구인지를 알려준다 - 주께서 크든 작든 모든 생물을 지혜로 만드셨으니 그것들이 땅에 가득하니이다(시편 104:24). 따라서 ‘진화’에게가 아니라, 대신에, 그분이 행하신 위대한 일에 대해 하나님께 영광을 돌려야 한다.
References and notes(참고문헌과 주석)
1. Zheng, L., Hedrick, T., and Mittal, R., A comparative study of the hovering efficiency of flapping and revolving wings, Bioinspir. Biomim. 8:036001.
2. Breuer, K., Flight of the Robobee, Nature 570(7762):448–449, 26 Jun 2019.
3. Jafferis, N. and 3 others, Untethered flight of an insect-sized flapping-wing microscale aerial vehicle, Nature 570(7762):491-495, 2019.
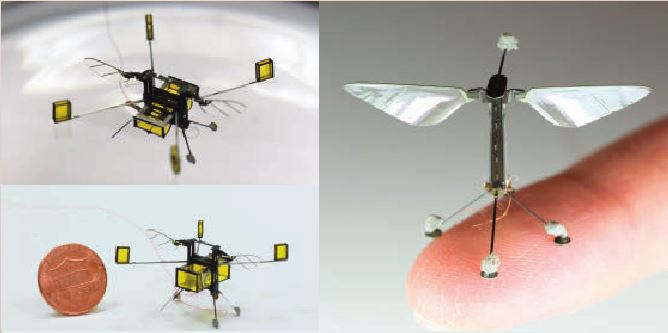
위의 사진에 있는 로보비는 동력을 위해 여전히 가는 케이블에 연결되어 있다. 여러 다른 로보비들이 일련의 동작을 하도록 설계되었다. 여기에는 비행과, 물에 착륙하고 수영을 한 다음 물 밖으로 몸을 내밀 수 있는 몇 가지 능력이 포함된다(왼쪽 사진). 생물에서 영감을 받은 초소형 로봇은 탐색 및 구조와 환경 연구와 같은 수많은 응용 분야를 위한 다양한 환경에서 작동하도록 설계되어 있다.(필립 로빈슨)
 장엄한 고릴라 - Lita Cosner and Robert Carter 글, 이종헌 역
장엄한 고릴라 - Lita Cosner and Robert Carter 글, 이종헌 역